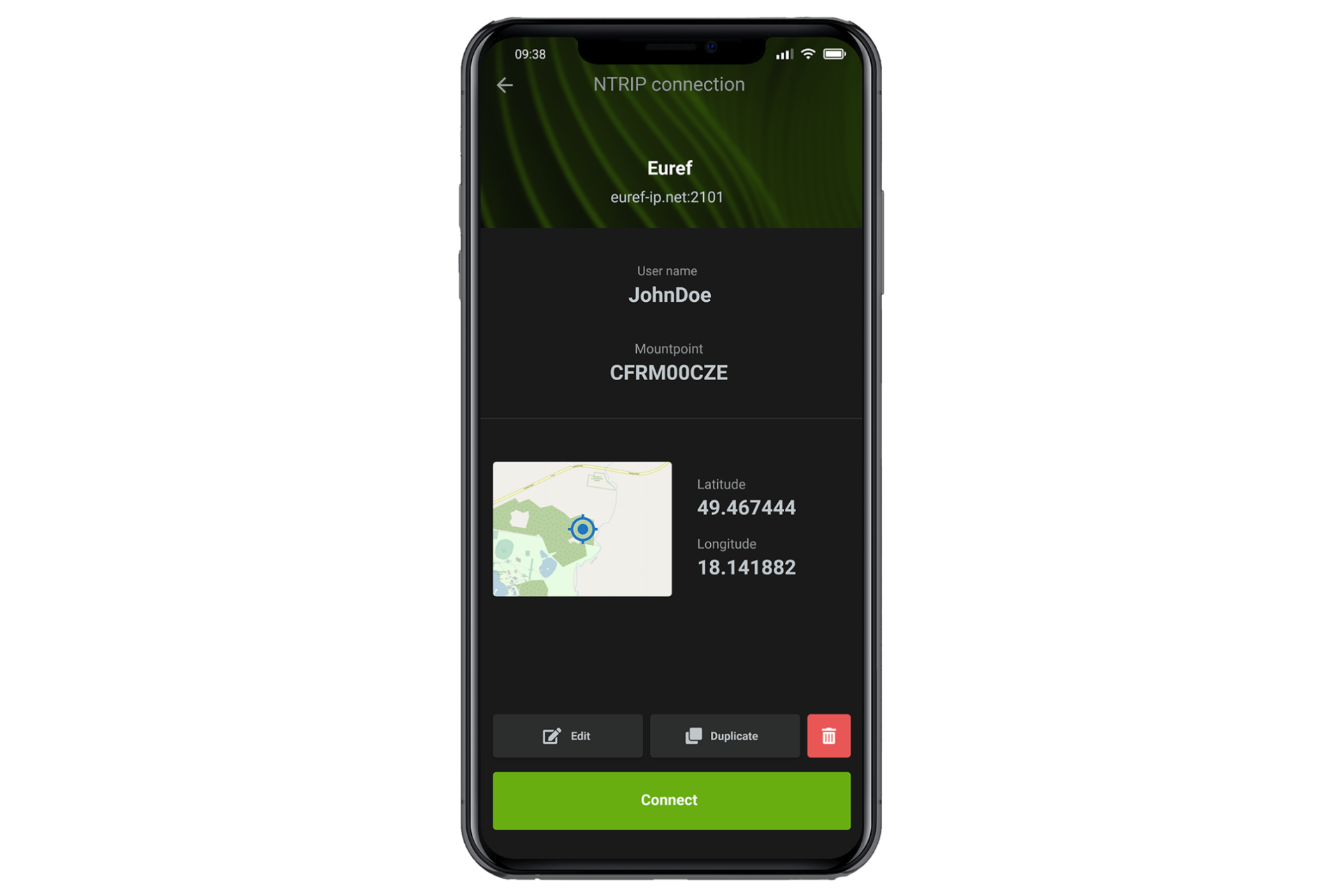
To provide a convenient way for GNSS end users and service providers to verify NTRIP connections in the field without having to set up heavy, expensive equipment in advance.
In the rapidly evolving landscape of high-precision GNSS correction-based technologies and services, drone operators, surveyors, and other professionals depend on NTRIP casters to get GNSS corrections data in real time. For them, high precision isn’t just an added advantage, but a fundamental requirement. Whether they’re mapping an area, constructing buildings, or orchestrating drone flights, a mere centimetre can make the difference between success and failure. However, dependence on NTRIP connectivity and adequate content of the correction streams presented several hurdles that couldn’t be ignored.
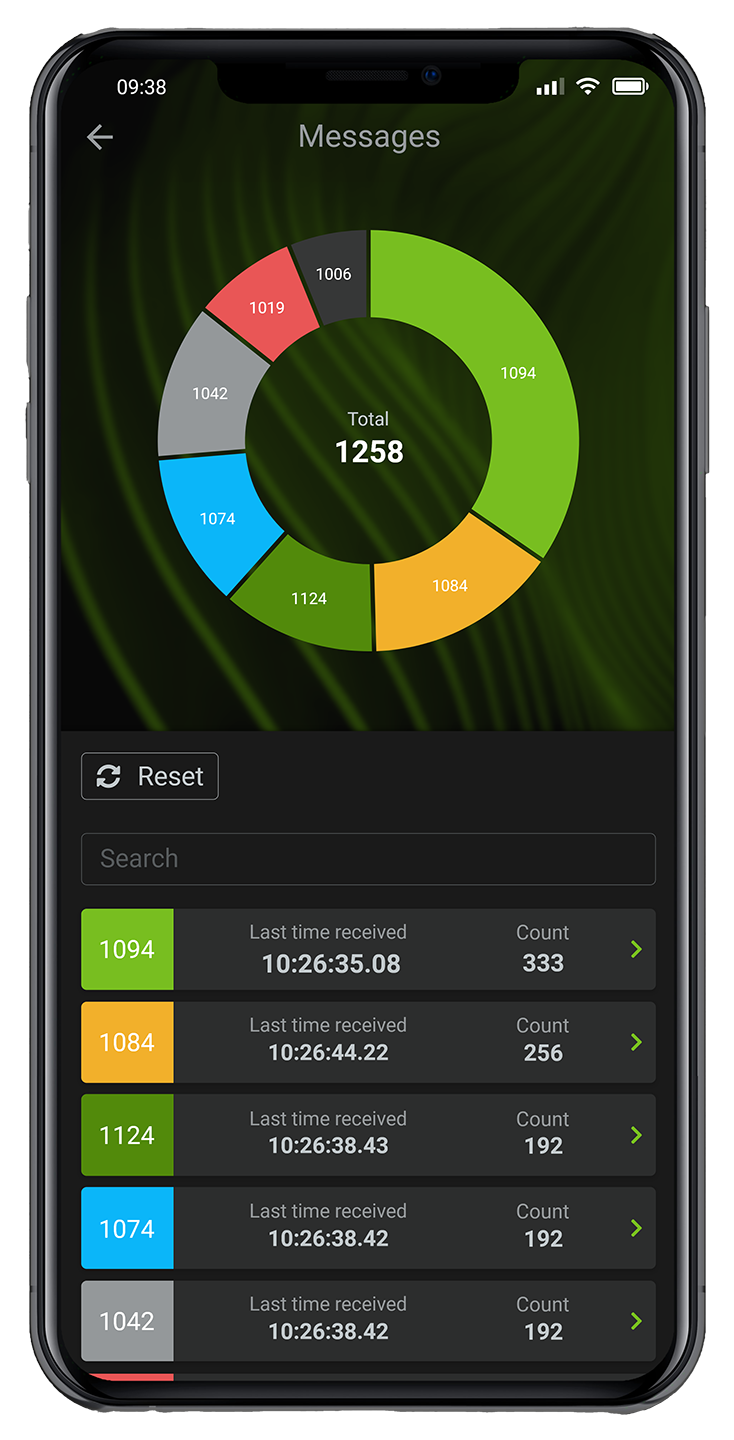
There are many factors that impact the availability of the GNSS corrections distributed over NTRIP. Examples include the proper configuration and availability of the NTRIP caster, valid credentials, subscription status, missing data connectivity, or being outside of a service zone. Additionally, even if the connection is successfully established, but the rover operator still cannot reach fixed state providing the highest accuracy, validating the content of the corrections stream can help to reveal the root cause of the failure.
The root cause may be on the provider’s side, where corrections for some signals aren’t available due to a misconfiguration or failure of the reference station’s receiver. Another possibility is when the station’s receiver cannot process some signals due to interference or obstacles causing missing visibility to the satellites. In case of VRS engines, which combine data from multiple reference stations, the problem could be down to the misconfiguration or overload of the engine. Other reasons are incompatibility of the corrections messages (e.g., MSM vs Legacy), or absence of some particular messages in the stream, which are necessary to compute the accurate user position.
Finally, the reason for not being able to reach the fixed state can be on the rover side itself, such as when an operator provides an invalid position. Other examples are rover setup misconfiguration or malfunction, poor data connectivity, or lack of GNSS signals.
In case of trouble, professionals need a way to quickly determine the root cause of the failure. The traditional approach involves lugging notebook with dedicated analytical software and modem providing data connection to the site to test the availability and content of the GNSS corrections. If the test equipment was unavailable, the operator would have to rely on the service provider support or use the lengthy trial-and-error approach.
Whenever planning a new mission, it is good practice is to test the availability of the corrections prior to going to the fields. If a corrections service with a given configuration at a selected location would be unavailable or would not meet the rover requirements, it would end up being a waste of time and a drain on resources and manpower. Such a situation proves especially cumbersome for field professionals, such as drone operators, who routinely have to travel to remote sites and often have to complete their operations within a limited timeframe.
Service providers themselves also face challenges. They need a way to validate new services before releasing them to the public, and they have to ensure consistent delivery and availability of their services with various configurations and in various locations in order to uphold the obligations of their SLAs.
With the GNSS ecosystem constantly expanding, and with users scattered across many different regions, there was an urgent need for a user-friendly solution that could efficiently validate and troubleshoot these connections in real time.
“With NTRIP checker, we created a go-to application for RTK network support engineers, surveyors, or any other rover operator.” - Tim Van den Eede (Chief Commercial Officer at Navmatix)